新闻资讯
张海平 | “数字液压”之我思(上)
当前,数字技术通过手机、微信,在社会大众中名声大噪,成为尽人皆知的技术名词。于是,“数字液压”也成为一个就连液压外行都感兴趣的时髦名词。本文介绍笔者对此的思考,欢迎讨论批评。
一、引言
数字技术是相对模拟技术而言的。
记得,在1979 年读硕士时,学校里已有模拟计算机,又添置了数字计算机,都是好几个大衣柜那么大。当时还曾有过模拟机、数字机孰优孰劣之辩。没几年,模拟机就乏人问津了。
从数字计算机开始,过去五十年来,数字技术一直在胜利进军。
音乐:在采用数字技术的光盘出现后没几年,采用模拟技术的唱片、磁带就都被挤到角落里去了。光盘上的DDD 表示录音、处理、保存过程全都采用数字技术。
过去的电视图像常会有“雪花飘飘”,那是模拟技术的电视信号受到干扰了。采用数字技术后,图像清晰稳定多了。相同的电线,可传输的数字电视频道数是模拟电视的十倍以上。
记录视频,(数字)光盘取代了使用模拟技术的磁(性录像)带,二十多年间,视频格式从低清晰度的VCD(352×288 像素)发展到DVD、蓝光、4K(3840×2160 像素)、8K(7680×4320 像素),纤毫毕现,胜于在前排看电影。
数字相机取代了采用模拟技术的胶卷相机,图像便于后处理,连专业摄影师都爱不释手。数字电影也正在淘汰胶片电影。
看上去,数字技术所到之处,无往不胜,在短短几年中就取代了过去长期使用的模拟技术。那么,“数字液压”也会取代传统液压吗,会或不会的原因是什么?这是本文试图探讨回答的问题。
模拟技术是以模拟量为基础的。数字技术则是在数字量的基础上发展起来的。一些相关概念的定义在不同的范畴里有所不同。在过程控制领域里,笔者是这么理解的。
模拟量,指的是,在时间上和空间上都是连续的,逐渐过渡的,在一定范围(定义域)内可能取任意值的量。比如说,油箱中的油温、液位、液压缸中活塞的行程、负载腔中的压力、比例阀阀芯的位移。
离散量,指的是,在时间上或空间上是不连续的,只取几个分立值,不存在中间值的量。例如,开关阀阀芯的位置,在正常工况下,忽略其开启关闭过程,只考虑全开和关两种状态,其位置就可认为离散量。再如,几个定量泵并联,可输出的流量,一般也常近似认为是离散量——各个泵输出流量的不同组合。
离散量是无序的。
离散量和模拟量之间没有绝对的界限。
模拟量和离散量是客观存在的。
数字量,世间本无数,凡人自为之,是人为约定的,对客观世界的抽象的简化的描述。数字造出来就是为了传递信息而非动力的。用数字可以对人施加心理上的压力,却不能传递物理上的压力。
数字量是有序的。
1)具有先后顺序。如,每次加1,结果总是1、2、3,而不能是1、3、2。二进制,数码只有0 和1,但也是有顺序的:0、1、10、11,...。
2)数码在不同的位置有不同的意义。如11,左边的1 的值在十进制中是右边的1 的10 倍。三万五千,人人皆懂。三千五万,就不行了。
无序的量不能算是数字量。
二、 数字技术得以广受欢迎的原因与应用范围
数字技术得以广受欢迎,是得益于至少以下几方面的特性。
1、高抗干扰性
现实世界基本是模拟的。实际用来保存传递信息的物理量,在保存、传输、再接收的过程中,总会受到不可预计的干扰,有无法确定的损失。例如,磁带上的磁性会减弱;电磁波在空气、导线中,光波在光纤中,长距离传输后,强度会衰减;光盘上的反射凹凸点经过几十年也会由于氧化而出现不均匀的高度损失。这样,实际接收到的信号强度与原始的就会有差别。比如说,发送端的信号强度是1.000±0.001V,接收端可能是0.990±0.005V。如果使用模拟技术,根据接收到的信号强度来处理,就会出现失真。转发次数越多,失真就越大。
数字技术的基础原理大致如下:发送接收方约定,发送方对要传递的模拟量采样,得到离散量,再把离散量逐个转化为由数码0 和1 组成的二进制数字量,用脉冲成组地发给接收方。接收方把收到的幅度小于一定值,比方说,0.3 的脉冲都看作0,幅度在一定范围内,比方说,0.7~1.3 的脉冲都看作1(图1),在此范围之外的都看作无效。然后,在需要处再把成组的二进制数转化成八进制、十六进制或日常生活习惯的十进制数,然后复原为模拟量。这就具有了极高的抗干扰性,获得了极强的可再现性,从而可多次转发。

图1 二进制编码信号传递原理
A—接收到的信号 B—根据约定解读出来的二进制数字信号
例如,手机、PC 机中的USB 接口约定,把+3~+15V 作为0,-3~-15V 作为1(图2)。
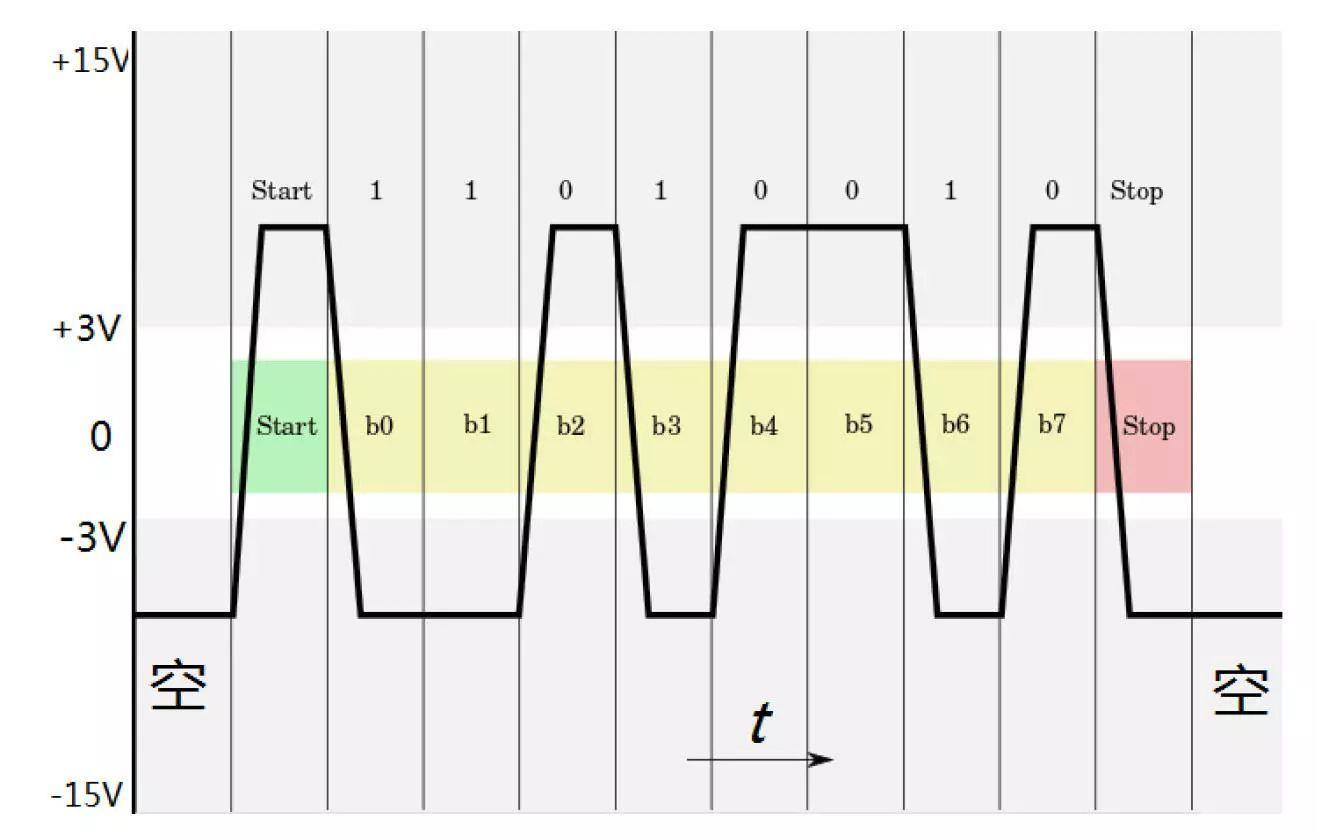
图2 USB 接口对信号的约定
这种抗干扰性,二进制胜过其他所有进制,例如,三进制。所以,现在在整个社会备受欢迎的数字技术,实际上是二进制数字技术。
编码信号传递时的频率一般固定,但不用Hz 作为单位,而是用b/s(bit/s 比特率,每秒能传送的数码个数),从早期的几千b/s 到现在的几百万b/s(Mb/s)乃至几十亿(Gb/s)。
2、可校核性
模拟量转化成数字量后就便于校核了。比如,在发送一批数据的结尾再发送一个校验码。约定,这批数据的总和的最后两位应该等于校验码。否则,这批数据全部无效,请求重发。
信息的可靠性由于可校核而进一步提高了。
3、综合表述能力
使用一串数字组合,数字技术现在已可同时表述世界上几乎所有的在用文字,表述各种声音、色彩、图像、音乐、电影等,其失真已达到常人难以察觉的地步。
4、可编程性
在数字技术基础上发展起来的计算机程序,一方面可被计算机执行,另一方面又可表述极其复杂的逻辑,从而使计算机可以实现复杂的过程控制,具有了一定的自学习能力,正在向人工智能挺进。
5、高速运算能力
手机中的中央处理器CPU 都已能进行每秒上亿次算术和逻辑运算。有些手机同时装有4 个CPU(4 核),其运算——执行复杂程序的能力已很难想象了。
6、高速传递能力
数字技术,一方面,由于利用电磁波和光波传播,速度达30 万km/s。另一方面,以极高的频率传播(手机的3G、4G、5G,本质上是应用了更高的频率),可以载送极多的信息。现在,家用光纤的传播速率都可达100Mb/s,已经可以同步传送高分辨率的视频。不消一秒钟,就可以传送完四大古典名著。
7、高集成度
现在,可携式硬盘,巴掌大小,存储量已超2T,相当于1 万亿个汉字,约80 万本红楼梦。而大规模云服务器的存储能力,则已难以用日常生活语言来描述。二进制数字信号被用电路的两个稳态来表示,因此,电路中的元器件不需要很高的精度,可以压缩得极小。现在,大规模集成电路中元件的大小只有头发丝的几百、几千分之一,一颗芝麻大小的集成电路可含几百万个电子元件。
8、低价格
制造集成电路的主要原材料硅,是地壳中第二丰富的元素,因此,取之不尽。过去五十年以来,随着制造技术的成熟,集成电路体积的缩小,每隔18个月,相同功能的集成电路的价格就下降一半。
9、互联网
在以上各项特性基础上发展起来的功能强大的互联网,已走进家家户户,甚至每个人的口袋。
数字技术以信息数字化为基础,但其之所以能够取代模拟技术,却是离不开以上诸多方面特性的支持,缺一不可。设想一下,如果手机还是20 年前的大哥大那么大,或是屏幕只是黑白的,或是拍了3 张照片内存就满了,或是不能连互联网,或是在朋友圈里发一张照片需要一个小时,或是发一张就要花费100 元,数字技术还会如此受欢迎吗?
即便如此,数字技术的应用范围也是有其局限的。
1)仅用于传递信息,电压只有几V,电流只有几个mA,所传递的功率对日常生活工程技术微不足道。
2)还有很多信息可惜至今还是要借助语言文字做一些词不达意的,极其主观的描述 ,尚未见数字化成功应用的公开报道,例如,关于香味、食品滋味的信息。
三、厘清一些概念
看到“数字技术”大受欢迎,有些液压“文献”也来乱点鸳鸯谱了。因此有必要在此梳理一下,给他们补补课。
1、脉码调制PCM
脉码调制PCM,全称Pulse Code Modulation 脉冲编码调制,是把模拟信号离散化,转化为数字信号的处理过程:根据一个约定的频率,对模拟信号采样;再把得到的离散的脉冲的幅值转化为二进制编码的数字量(图3)。

图3 脉码调制PCM
A-模拟量 B-脉冲 D-二进制编码
语音通讯(电话)在上世纪七十年代就开始采用这一过程。例如,采样频率为8k,即每秒采8k(8000)个脉冲,再转化为8 位的二进制编码,即一个脉冲8 个bit。这样,64k 个bit 就可以表达一秒钟的语音了。这样,就可以把语音变成数据包,高速输送了。如果网络的传播速率为100Mb/s 的话,就可以同时传送约(100M/64k≈)1560 个语音(电话)。收到后再按约定的频率(8k)复原,基本可以反映人声。现在,通过互联网传送的声音也都是这样数字化了的。
一般模拟信号数字化,常称为模数A/D 转化的,大致都采用这一过程。所以,PCM 是数字技术的基石。
8 位二进制数只能表达0~255,对液压测量,分辨率太低,所以常采用12 位,可以表达0~4095,即约0.025%的分辨率。
2、脉幅调制PAM 和脉频调制PFM
这两者都不属于数字技术。
脉幅调制PAM,全称Pulse Amplitude Modulation 脉冲幅度调制,简称调幅(AM),直到上世纪80 年代,还是被普遍用于无线电广播(长波、中波、短波):用要传递的模拟信号去调制一个具有较高的固定频率电波(载波)的振幅,得到可发射的调幅信号(图4)。接收端再把收到的信号滤去载波,还原出模拟信号,放大,推动喇叭。由于调幅信号中的干扰难以识别排除,因此,收听到的广播常是带杂音的。

图4 脉幅调制PAM 和脉频调制PFM
脉频调制PFM,全称Pulse Frequent Modulation 脉冲频率调制,简称调频(AF):用要传递的模拟信号去调制一个更高频电波的频率,得到可发射的调频信号。因为干扰一般只会影响信号的幅值,不会影响信号的频率,因此,从调频信号中解调得到的模拟信号所含干扰极少。所以,调频广播的音质较调幅好得多。自上世纪后期开始,沿用至今,看来还会长期使用。
3、脉宽调制PWM
脉宽调制PWM,全称Pulse Width Modulation 脉冲宽度调制,由一系列方波组成(图5)。虽然脉冲形状有点像数码脉冲,但作用原理截然不同。

图5 脉宽调制PWM
1)幅值是离散的,只有0 和满幅值(例如24V)。
2)有固定的频率,液压技术中使用的一般为100 至200Hz,即周期10~5ms。
3)脉冲宽度可以取任意值,比如说,周期的35%、52.5%等。
方波的持续时间,在多数工况,是离散的。在脉冲宽度100%时,就不再离散。
4)液压技术中,PWM 被用于传递功率,驱动比例电磁铁,最大电流在1A 上下,功率在几到几十W。
5)PWM 不具有前节所述数字技术的高抗干扰性、可校核性、综合表述能力、可编程性、高速运算能力和高速信息传递能力。
6)PWM 可以算为离散量,但不应该算作数字量,因为它不具有数字量的基本特点——有序。
PWM 早在上世纪七十年代就与比例电磁铁技术一起被应用了。如果因为用了PWM就算是
数字液压,那目前所有使用电比例阀的液压系统都可算作数字液压了。
4、脉数调制PNM
脉数调制PNM,全称Pulse Number Modulation 脉冲数目调制,也被称为脉冲密度调制(图6)。虽然脉冲形状有点像数码脉冲,但作用原理也截然不同。

图6 脉数调制PNM
1)脉冲的幅值是离散的,只有0 和满幅值。
2)脉冲的宽度一般是固定的。
3)脉冲(在单位时间内)的数目,也即脉冲的密度(频率)在一定范围内可以取任意值。
4)PNM 不具有前节所述数字技术的可校核性、综合表述能力、可编程性、高速运算能力和高速信息传递能力。
5)PNM 可以算为离散量,但不应该算作为数字量,因为它不具有数字量的基本特点——有序。所有的脉冲,无论先后,都是等价的。
PNM 可用于驱动步进电机。由步进电机的结构决定(图7),在一定频率范围内,每输入一个脉冲,定子上的磁极就会对转子上的齿又推又拉,迫使转子转动一个齿,一个固定的角度,不多也不少。因此,转子的转交对输入的脉冲的数目有较强的再现性(抗干扰性)。

图7 步进电机工作原理示意
1—定子 2—转子
转子的转角一般是1.8°/步,即200 步/转,也有的可达1000 步/转。
被转子惯量所限,如果步进脉冲频率太高,一般超过几千Hz,就会失步:转子转动角就不再跟随步进脉冲。
驱动步进电机的步进脉冲,峰值电压一般为几十V,电流为几个A,其最大转矩仅几个Nm,用于直接驱动液压泵的话,只能提供几bar 几L/min 流量。所以,一般仅用于驱动电液转换阀的阀芯。
5、“数字液压能与计算机直接相连”
这是讹传!
1)计算机中电子元件间的工作电流都小于几个mA。而控制任何液压元件,需要的信号电缆都至少几十mA,是计算机内部电缆的万倍以上。因此,计算机要驱动任何意义元件都需要功率放大,不可能直接连接。
2)计算机中电子元件间都是通过内部总线传递并行信号,从早期的8 位到现在常见的64 位。任何输出信号都需要专门的电子元件从这个内部总线中取出转化放大,无论是控制伺服阀的模拟信号,还是控制比例阀的PWM 信号、驱动步进马达用的PNM 信号;哪怕是最简单的开关信号,也需要一个专用电子元件,从并行总线中取出某一位。
个人用计算机的输出接口,以前有连接打印机用的25 针并行口、连接鼠标用的9针串行口,现在只有耳机接口、HDMI 和USB 接口。这些接口都不能与液压元件直接相连。
一些工业控制计算机或PLC 有专用接口,可以输出控制液压元件用的模拟信号、PWM 信号、PNM 信号和开关信号,但都是根据需要特地设置的。不同的电子元件和放大器是有些价格差,但在电子工业高度发达的今天,这些价格差相对整个液压系统的造价已可忽略不计了。
所以,“计算机控制离散液压元件,不需要D/A 转换元件”是对的,但所谓“数字意义能与计算机直接相连”这种说法是讹传,纯属忽悠!
6、“高速开关数字阀”
高速开关阀有可能被用于“离散液压”,代替模拟阀——伺服阀、电比例阀(见下节)。在气压传动中早就应用了。因为气体弹性大,虽然阀快速开关,气体压力依然是连续变化。但液体刚性大,应用就不那么简单,必须有措施抑制压力冲击,所以仍处于探索阶段。真正用于液体的高速开关阀,至今还只是被用于燃油的电喷,这并非正宗意义的液压传动。
高速开关阀凭什么叫“数字阀”?
是因为控制阀的信号是PWM 吗?切换普通开关阀的电信号其实也是与PWM 相同的方波,只是持续时间长些而已。
高速开关阀和普通开关阀的功能都是开关,切换速度的不同,并未引起什么质变。凭什么高速就能(需要)挂上“数字”,难道低速开关阀是模拟阀吗?
挂上“数字”,混淆概念其实无助于其推广应用。
7、“数字液压”
参考文献[8]叙述了作者提出“数字液压”的理由:
接触到之前的“数控脉冲
液压缸”技术后,发现它很像数字电子技术,即:具有标量化特征,也就是这种液压缸的运动特性完全与电脉冲对应,脉冲的数量准确的对应油缸的运动行程,脉冲的频率对应着油缸的速度,它几乎不受负载和油压波动的影响,甚至它的设计、制造、
使用和维护等,都大为简化,与数字电子技术的很多特征极其类似,因此才将原本更专业化或技术化的名词改为更形象化的称其为:“数字液压”。’
1)此处提到“数控脉冲具有标量化特征”。在中国所有理科工科大学生都要学的大学物理中定义(百度上也可查到):标量,是相对矢量而言的,即,是只有数值大小,而没有方向的物理量,如质量、温度、功、能量、体积、热量、电阻、功率、势能等。标量和矢量,是物理学的基础概念和不可或缺的工具,但和(二进制)数字技术并没有因果,或分类上的关联关系。所以,用“标量”来引出“数字液压”,从逻辑上是说不过去的,除非作者重新定义“标量化”。而要对一个中国所有大学教材通行的基础概念做出新的定义,那就必须做出详细的解释,否则就是混淆概念。
2)读其上下文,大致可理解,该文作者是因为“数控脉冲”的可再现性与数字
技术“极其类似”,为了形象化,才把“数控脉冲液压缸”改为“数字液压”的。但是,可再现性并非现代数字技术得以广泛应用的唯一特性,也并非数字技术独有的特性。仅因某一点类似,就挂其名,
就像几个句子因为押韵就称为是诗一样。严肃的新闻记者都不会这么做,我们科技工作者更不应该这样随意玩弄概念。技术分类不是写小说,可以靠丰富的想象力随意联想的,必须认真严谨行事。
3)文中提及“脉冲的数量准确的对应油缸的运动行程,脉冲的频率对应着油缸的速度,它几乎不受负载和油压波动的影响”。此说不准确!
因为,通过脉冲发给“数控脉冲液压缸”的,是希望的活塞行程,而通过机械(丝杆)反馈的是实际的活塞行程。两者之间的差控制了一个流量控制阀的开口。因此,在阀进口压力高于负载压力的前提条件下,活塞迟早会到达希望的运动行程,这是可能的。
但是,活塞运动的速度是由通过阀进入油缸的流量决定的,而通过阀的流量不仅取决于阀开口的大小,而且取决于阀两端的压差,这是每个搞液压技术的人都必须知道的基本常识。因此,活塞的运动速度不可能不受负载和油压波动的影响。而这个影响,对速度控制系统是至关重要的性能考察指标,是不能简单地用“几乎不”来敷衍的。而且,步进电机在某些工况会丢步,这是一个该文也未否认的事实。所以,“脉冲的频率对应着油缸的速度”是有严格的前提与范围的,是不能一笔带过,避而不谈的。
4)参考文献[8]提及磁致伸缩位移传感器的精度是相对“全量程”的,而滚珠丝杠是有精度分级,由此得出结论“可见滚珠丝杆比磁致伸缩位移传感器精度高出很多”。一方面,这个推论根本不符合逻辑。另一方面,根据国家标准GB/T17587.3(等同ISO3408-3),滚珠丝杆的允许偏差也是与长度有关的,百度上都能查到。因此,只能说“某个精度等级滚珠丝杆的精度高于磁致伸缩位移传感器”。在此前提下,再比经济性,才顺理成章。
改名称改不了事实,忽悠是不能持久的。特别是对于非本专业的领导。领导不可能样样都内行。领导信任你,你却忽悠领导。小心“欺君之罪”!
四、关于“数字液压”的定义
在欧洲,数字液压的研究主要集中在芬兰坦佩雷理工大学(Tampere University of Technology)、奥地利的林茨大学(Johannes Kepler University Linz)等几个研究机构。
坦佩雷理工大学Linjama 先生曾提出如下定义:“Digital Fluid Power means hydraulic and pneumatic systems having discrete valued component(s) actively controlling system output.”[2] 大意为:数字流体动力指的是那些液压和气动系统,它们具有离散量元件主动控制系统输出。注意:此定义只提及数字系统和离散量元件,并未提及数字元件。该文给出了一些可能的模式。参考文献[6]指出了一些模式可会遇到的问题。一并归结如下。
(1)阀控离散化
使用开关阀,代替传统(模拟)液压中的模拟阀。所控制的流量理论上是离散的。但如果开关非常频繁,分级相当细的话,效果就可接近或等同模拟控制(见表1)。
表1 阀控离散化的可能模式

1)单阀,利用PWM 信号驱动,通过控制开启时间来控制通过流量(图8a)。

图8 阀控离散化的可能方案
a)单阀 b)多阀
如果用步进电机控制阀,虽然接收的是步进脉冲,但控制流量阀是模拟阀,不能是开关阀。所以,只能算是介于离散液压与模拟液压之间的产品。
2)多阀(图8b),有两种可能:
a)各阀相同,由信号控制开启个数。
b)各阀(节流孔)不同,通流面积按2 倍递增。这样,如果用6 个阀,理论上就可以获得共64 种通流面积。
(2)泵控离散化
1)单泵,利用PWM 信号,通过控制旁路阀开启时间的长度来旁路流量,这样就不再需要用于维持恒压的溢流阀,可以僐少能耗(图9a)。这里,蓄能器的液容就起着类似比例电磁线圈的电感的作用,尽管压力是脉冲的,但保持流量连续。

图9 泵控离散化的可能方案
a)单泵 b)多泵
旁路阀的开启关闭总是需要一定时间,在这段时间中,会有一定流量通过阀口,造成能量浪费。时间越长,浪费越大。所以,最好使用高速开关阀。但时间越短,则对泵的压力冲击梯度越大,对泵的寿命危害越严重。
2)多泵(图9b),根据需求关闭旁路阀,可以得到不同的输出流量,以取代变量泵。此方案的原理并不是全新的。用低压大流量高压小流量的双泵来离散地代替恒功率变量泵,已有上百年历史了。
以上这些方案,实际上是用离散元件取代了模拟元件。所以,笔者认为,称为“离散液压”更贴切一些。
国内有文献将此称为“狭义的数字液压”,而将国内出现的形形色色使用PWM 和PNM 控制的所谓“数字液压”称为“广义的数字液压”。
概念是人定义的,对某个已通用的名词提出新的解释、新的定义,也是可以的。但是,提出者应该加以说明,而听者则应首先了解其定义,究竟指的是什么东东。靠混淆概念,是不能持久的。
另外,也应该考虑已经通行的惯称。例如,把“在工厂里指导过博士生实习”简化为“博导”,从文字上是说得过去的,但拿到社会上去自我标榜,就是鱼目混珠、欺世盗名了。
关在家里,可以把中文中称为“鹿”的动物定义成“Ma”,但如果想借此参加国际赛马比赛,那是要被笑掉大牙的。
未完部分见下篇。。。
原稿见“iHydrostatics”